LiDAR is widely used as a reference sensor in mapping and inspection workflows, particularly where geometric accuracy and precise spatial positioning are critical. In most cases, it provides highly reliable data.
However, in complex environments—such as reflective urban structures, industrial sites, or airborne particle conditions—the resulting point cloud may include artifacts that require careful interpretation.
These artifacts do not indicate a failure of the sensor. They are a natural consequence of how laser signals interact with real-world materials and environments—and they are typically addressed as part of standard processing workflows.
LiDAR artifacts are often grouped under general “noise,” but in practice they fall into distinct categories with different causes and implications.
One of the most significant sources of false geometry is multipath reflection. Ideally, a laser pulse travels from the sensor to a surface and then back directly to the sensor and generates a measured distance. This distance is then used to generate a point in 3D space.
However, in real environments—especially those with reflective materials—the path is not always direct. A laser pulse may reflect off one surface, then bounce to another surface and only then return to the sensor
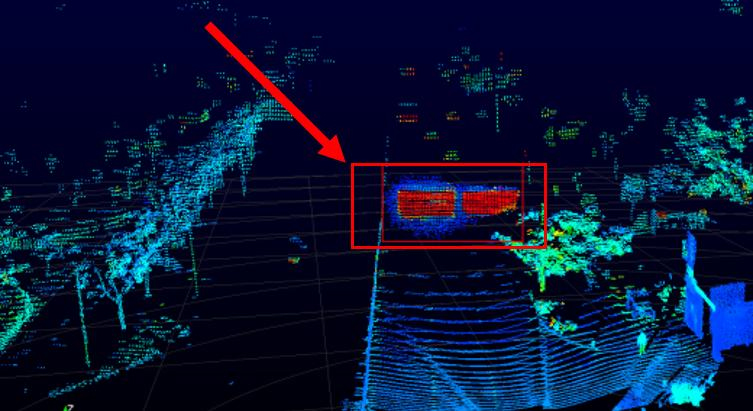
The sensor has no way of knowing this. It assumes a linear path and generates a point accordingly. The result is a point placed at an incorrect location—often appearing as if it is floating in space or forming a secondary, ghost version of a real object.
This effect is particularly common in environments with:
The resulting ghost points can form coherent structures. In some cases, entire duplicated surfaces appear offset from their true positions. In inspection workflows, this can be misinterpreted as deformation, displacement, or additional structural elements.
For example, research datasets such as Ghost-FWL (CVPR 2026) demonstrate that ghost geometry consistently appears in scenes with reflective materials, where indirect returns create systematic spatial distortions. Similar findings in radar signal processing show that these artifacts follow predictable geometric patterns based on surface orientation and observation angle, rather than occurring as noise.
Most of these artifacts can be identified through intensity inconsistencies, geometric isolation, or manual inspection and removed during post-processing.
Another class of LiDAR artifacts arises from how LiDAR samples geometry and how the laser footprint interacts with surfaces.
Each laser pulse has a finite footprint that increases with distance. When this footprint intersects complex geometry, edges, or thin structures, the returned signal represents a mixture of surfaces rather than a single, clean reflection.
This can produce two different effects: overgrowth and floaters.
Overgrowth refers to surfaces that appear thicker, expanded, or “bloated” compared to reality.
This effect is primarily caused by beam footprint size and divergence. When the laser spot covers multiple adjacent surfaces, especially at edges or in fine structures, the system reconstructs a smeared representation of geometry.
Overgrowth is commonly observed in:
The severity of the effect depends on:
Floaters are points that appear detached from any physical surface.
Unlike overgrowth, floaters are more commonly associated with:
Floaters often appear as isolated points or small clusters “floating” in space, without forming a continuous surface.
The third major source of false geometry is the interaction of the laser beam with the atmosphere itself.
In clear conditions, this effect is minimal. However, in places filled with airborne particles—like dust, sand, smoke, or aerosols—the laser beam can be reflected before it even hits a solid surface. This reflected energy returns to the sensor and is recorded as valid data.
This is particularly relevant in:
Unlike random sensor noise, these points can form structured “clouds” that resemble terrain features or obstacles. Strong atmospheric scattering can reduce effective ground point density, but modern LiDAR systems mitigate this through high pulse repetition rates and wavelength selection optimized for atmospheric penetration.
One of the main assumptions in many LiDAR workflows is that surfaces will reflect laser energy in a reliable and uniform manner. However, the truth is that various materials respond to laser light in distinctly different ways.
Glass is of the most difficult problems for LiDAR. Depending on the angle of incidence and surface properties, a laser pulse may pass through the glass, reflect off the surface or do both partially
This leads to two types of errors:
In urban environments with extensive glass facades, this can result in incomplete building models or the appearance of internal structures that were never intended to be captured.
Metal surfaces, especially those that are polished or painted, reflect laser energy very efficiently. While this might seem good, it introduces its own set of problems. Strong reflections can lead to:
The issue becomes more pronounced at shallow angles of incidence, meaning when the laser beam approaches the surface at a low angle relative to the surface normal. In such cases, reflected energy is more likely to return directly to the sensor, increasing saturation effects and geometric distortion.
We’ve previously explored how these challenges play out in real-world infrastructure mapping and their impact on drone operations, particularly in the context of advanced aerial platforms and mission planning strategies: The Problem of Drone Mapping in Glass-and-Steel Cities
At certain angles, water can act like a mirror. At others, it absorbs most of the energy, resulting in no return. In some cases, partial penetration can occur, producing weak or ambiguous signals.
This variability makes water surfaces highly unreliable in LiDAR datasets. The same body of water can appear as:

Unlike solid surfaces the particles in the air present a volumetric scattering of the laser beam.
Instead of a single reflection point, the beam is scattered across many particles along its path. The sensor records some of this scattered energy as discrete points, even though no continuous surface exists.
This leads to:
In desert mapping and large-scale infrastructure projects, this effect can significantly degrade data quality and increase post-processing effort.
| Artifact type | Physical cause | Typical environment | Result in point cloud | Operational impact |
| Ghost points | Multipath reflection | Glass, metal, water | Floating or duplicated geometry | False structures, misinterpretation |
| Overgrowth | Beam footprint and divergence | Vegetation, cables | Thickened geometry | Overestimated volumes |
| Data voids | Transmission or absorption | Glass, water | Missing surfaces | Incomplete models |
| Noise clouds | Atmospheric scattering | Dust, sand | Random or clustered points | Increased filtering effort |
In real-world workflows, LiDAR artifacts are not treated as anomalies that invalidate a dataset. They are expected and systematically addressed during processing.
The first and most critical stage is point cloud preprocessing and classification.
Modern software environments such as DJI Terra and LiDAR360 provide tools to:
In practice, a significant portion of floating points and atmospheric noise is removed at this stage.
A second layer of refinement is performed at the model editing stage using tools such as DJI Modify, Lidar 360, Terrascan.
This is particularly important in scenarios where artifacts are tied to dynamic objects. For example:
These elements can be selectively removed or corrected, ensuring that the final dataset reflects only stable, relevant geometry.
While processing plays a major role in refining LiDAR data, the quality of the initial dataset is determined at the acquisition stage.
There are several hardware-level factors that directly influence how susceptible a system is to artifacts:
These factors define the difference between consumer-grade and professional LiDAR systems.
For example, advanced payloads such as the DJI Zenmuse L3 are designed to:
This does not eliminate artifacts entirely—but it significantly reduces their impact and improves the reliability of downstream processing.
The central misconception in many LiDAR workflows is the assumption that the sensor directly captures physical reality.
In truth, LiDAR measures how light interacts with the environment. Every point in a dataset is the result of a physical process involving reflection, absorption, or scattering.
When those processes behave in complex or unexpected ways, the resulting data reflects that complexity.
Ghost points, floaters, and noise are not anomalies in the traditional sense. They are consistent, physics-driven outcomes of specific conditions.
Understanding this distinction is critical for anyone working with LiDAR in real-world environments. It shifts the focus from expecting perfect data to interpreting data within the context of how it was generated.
In infrastructure projects, where decisions depend on accurate spatial information, this understanding is not theoretical. It directly affects reliability, efficiency, and the ability to trust the final result.