We are glad to introduce the INNO8 GNSS receiver – a new GNSS receiver from SOUTH released in 2024.
INNO8 offers exceptional accuracy in surveying and mapping tasks. It boasts high performance – the board supports up to 1760 channels, which allows to receive the signal quickly and reliably. INNO8 uses a new superior data transmission system, which is compatible with modern radio protocols on the market, and ensures random switching of the 410-470 MHz frequency range, as well as of the power level.
The receiver improves the user experience by integrating additional functions such as 3D modeling, while Farlink 2.0 support ensures smooth communication and data transmission, and the 4th-generation IMU improves motion recognition and accuracy in dynamic conditions. This is a new-generation IMU, which only requires 2-5 seconds to complete the initialization, and the maximum tilt compensation angle can reach 60 degrees. It can ignore magnetic interference, while the RTK receiver functions in this magnetic environment. This professional IMU module can maintain the tilt effect for about 40 seconds if the RTK receiver remains in place without moving.
The receiver works in tandem with the SurvStar software on Android, which implements many geodetic surveying functions, including working with CAD files (dxf, dwg) or other vector formats.
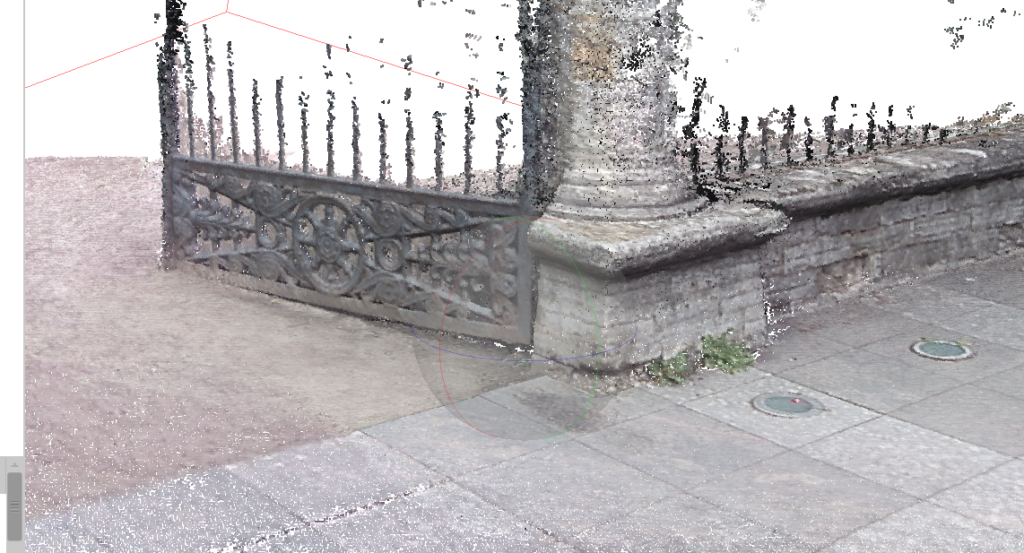
Image post-processing was performed using Agisoft Metashape.
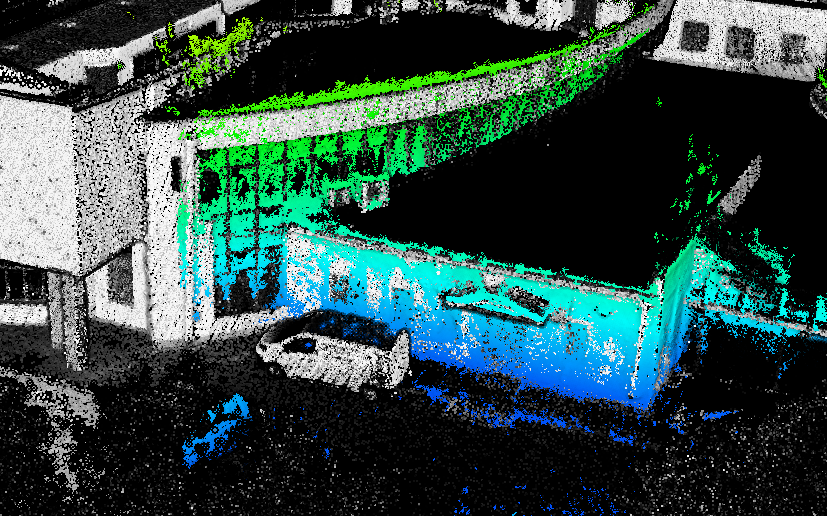
We also compared the data from INNO8 with the mobile laser scanning data and obtained results that correspond to the stated accuracy.
Let’s examine what we believe to be the receiver’s key features:
INNO 8 has 2 built-in cameras on the bottom of the case and on the side surface. Thanks to these cameras, the receiver implements functions that significantly alter work efficiency and introduce new methods of working with GNSS receivers.
The augmented reality point offset function is implemented using cameras.
Augmented reality (AR) offset significantly increases the speed of work due to the presence of visual information and audio prompts – when approaching the offset point, the receiver uses voice prompts. This approach reduces the gap between experienced surveyors and beginners. In this mode, the inertial reception system is also used, both for the correct visualization of the offset point in the area and for point coordination.
The take-off function in augmented reality is implemented as follows:
“Visual positioning.” Photogrammetry in real time.


Visual positioning expands the scope of RTK application due to the integration of photogrammetry and RTK positioning technologies. Thanks to an 8-megapixel camera, IMU and the latest positioning algorithm, INNO8 allows to perform high-precision photogrammetric surveys and calculate the coordinates of points obtained from the survey directly on the controller. This method allows to coordinate objects that are problematic for traditional methods, including complex angles under roofs, bridges, vertical surfaces, objects inaccessible to the surveyor. This feature increases the versatility of surveying work, allowing to conduct effective and accurate surveying and mapping of places that were previously difficult to access using RTK surveying methods.
Let’s take a closer look at the capabilities and process of visual positioning.
Certain conditions must be met to implement photogrammetric functions.
The receiver must issue a fixed coordinate solution, use a Wi-Fi connection to the controller, and the exact height of the pole must be specified – since it is taken into account when calibrating the inertial system, which is also involved in the survey process.
INNO8 allows to implement 3 photogrammetric survey methods:
Start shooting after selecting the shooting mode and initializing the IMU, and data processing will begin at the end of the shooting.
SurvStar offers two data processing scenarios. With a good internet connection, images are processed online via the SOUTH network and cloud servers.
INNO8 can obtain coordinate data for image measurements with an accuracy of 2 cm in just a few minutes. This processing mode provides the highest measurement accuracy.
When out of internet coverage, surveyors can process image data offline using the controller in SurvStar. This processing mode provides the fastest processing speed by saving time on uploading image data to the server and allows you to obtain results with an accuracy of 4 cm within 30 seconds.
Also, at the end of the survey, all data is saved in controller memory, and you can easily build photogrammetric models in SOUTH Geo Office – software for processing GNSS data or other third-party applications.
A photogrammetric project contains images, a camera calibration file, a file of image coordinate centers in WGS 84 and the project coordinate system, which allows to perform photogrammetric processing using any photogrammetric software.
An example of photogrammetric survey using INNO8.
Combining different methods of geodetic measurements significantly improves surveying quality. We find the ground method and UAV use to be particularly effective.
Another feature of INNO8 significantly increases the efficiency of working with DJI drones and more.
The Wi-Fi module in SOUTH receivers not only serves to connect the controller, but can also function as a distributing device, which allows you to receive corrections via the NTRIP protocol for DJI drones and work in RTK mode without using a mobile Internet network.
To do this, you need to install the receiver on a point with known coordinates.
Set the device to base mode. Enter the receiver coordinates via the web interface, set the receiver height and the NTRIP correction distribution configuration.
Subsequently, you can connect your remote control to the receiver’s Wi-Fi and set up the connection: enter the host, port, user, password and mountpoint that you configured earlier via the receiver’s web interface.
Below you can see all the technical characteristics of our new product:
| Product Name | south INNO8 |
| Channels | 1598 |
| GPS: | L1, L1C, L2C, L2P, L5 |
| GLONASS: | L1C/A,L1P,L2C/A,L2P,L3 |
| BDS: | BDS-2: B1I, B2I, B3I, BDS-3: B1I, B3I, B1C, B2a, B2b* |
| GALILEO: | E1, E5A, E5B, E6C, AltBOC* |
| SBAS(WAAS/MSAS/EGNOS/GAGAN): | (WAAS/MSAS/EGNOS/GAGAN): L1* |
| IRNSS: | L5* |
| QZSS: | L1, L2C, L5* |
| MSS L-Band: | BDS-PPP, Galileo HAS |
| Other Features | Positioning output rate: 1Hz~20Hz |
| Code differential GNSS positioning |
H: 0.25m+1 ppm RMS
V: 0.50m+1 ppm RMS
|
| Static(long observations) |
H: 2.5mm+0.1 ppm RMS
V: 3mm+0.4 ppm RMS
|
| Rapid static |
H: 2.5 mm + 0.5 ppm RMS
V: 5 mm + 0.5 ppm RMS
|
| PPK |
H: 3 mm + 1 ppm RMS
V: 5 mm + 1 ppm RMS
|
| RTK(NTRIP) |
H: 8 mm + 0.5 ppm RMS
V: 15 mm + 0.5 ppm RMS
|
| RTK initialization time | 2 ~ 8s |
| BDSPPP |
H:10cm
V: 20cm
|
| Galileo HAS |
H: 20cm
V: 40cm
|
| Operating system | Linux |
| Dimension | 155mm(Φ) *98.5mm(H) |
| Weight | 1.2kg |
| Material | Magnesium aluminum alloy shell |
| Temperature | Working: -45ºC to +75ºC Storage: -55ºC to +85 ºC |
| AR Stakeout Camera | Pixel:2M |
| Visual Angle:75° | |
| I/O Ports | 5-PIN LEMO (external power port + RS232) Type-C(charge+USB+OTG+Ethernet) UHF antenna interface |
| Cellular Network | 4G LTE, 3G WCDMA, 2G GPRS, GSM |