This article summarizes the findings from the study “Comprehensive Performance Evaluation between Visual SLAM and LiDAR SLAM for Mobile Robots: Theories and Experiments” published in the journal Applied Sciences by Kibum Kim, Donghoon Shin, and Jongwon Kim.
The study provides an in-depth analysis of two key SLAM (Simultaneous Localization and Mapping) technologies—Visual SLAM and LiDAR SLAM—focusing on their theoretical foundations and practical applications in mobile robotics. It offers valuable guidance for researchers and engineers in the field.
Theoretical Foundations
Visual SLAM:
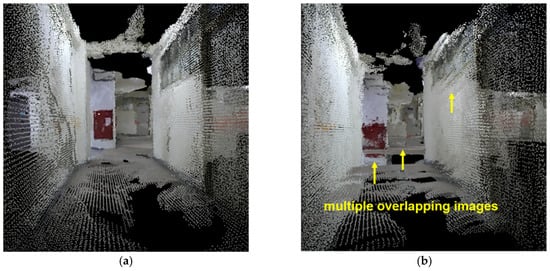
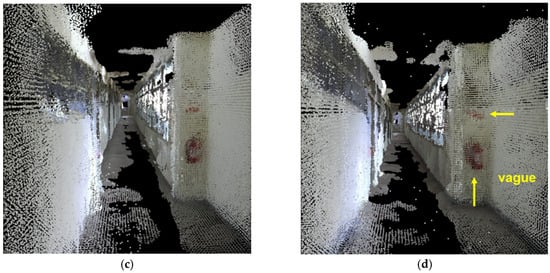
This approach uses cameras to gather visual data from the environment. Images are processed to identify key features and construct maps based on visual cues.
- Advantages: Cost-effective and leverages readily available hardware.
- Limitations: Sensitive to lighting conditions and struggles in environments with poor illumination or lack of distinct textures.
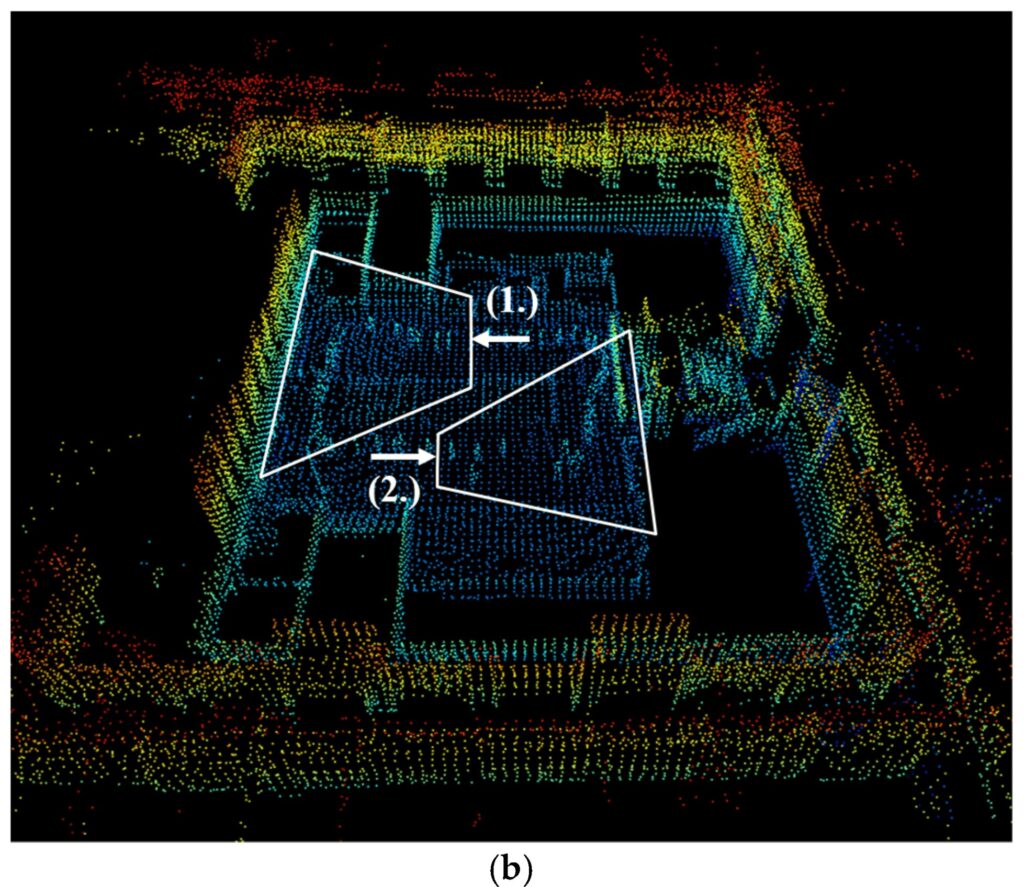
LiDAR SLAM:
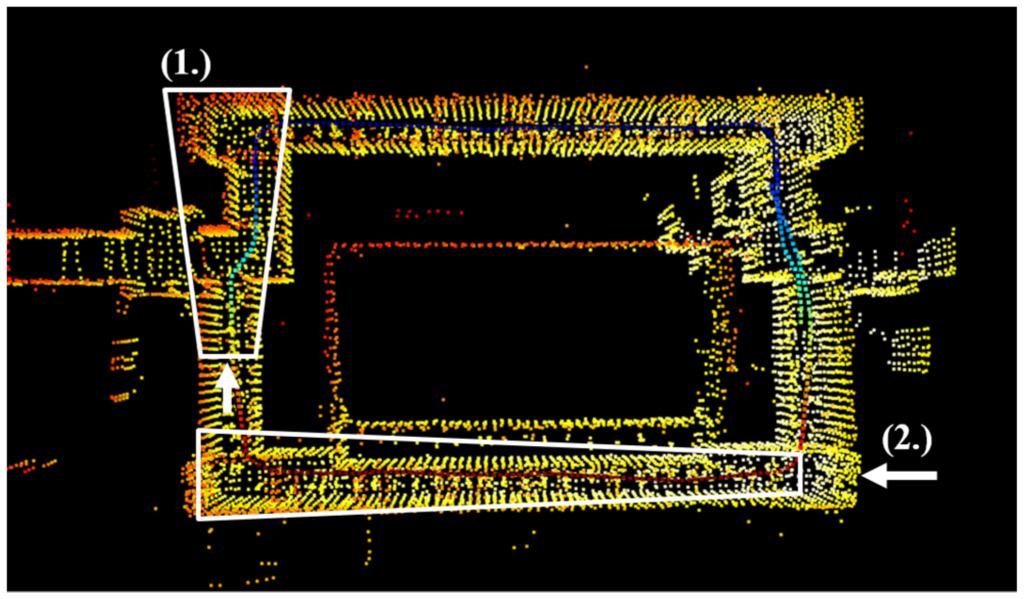
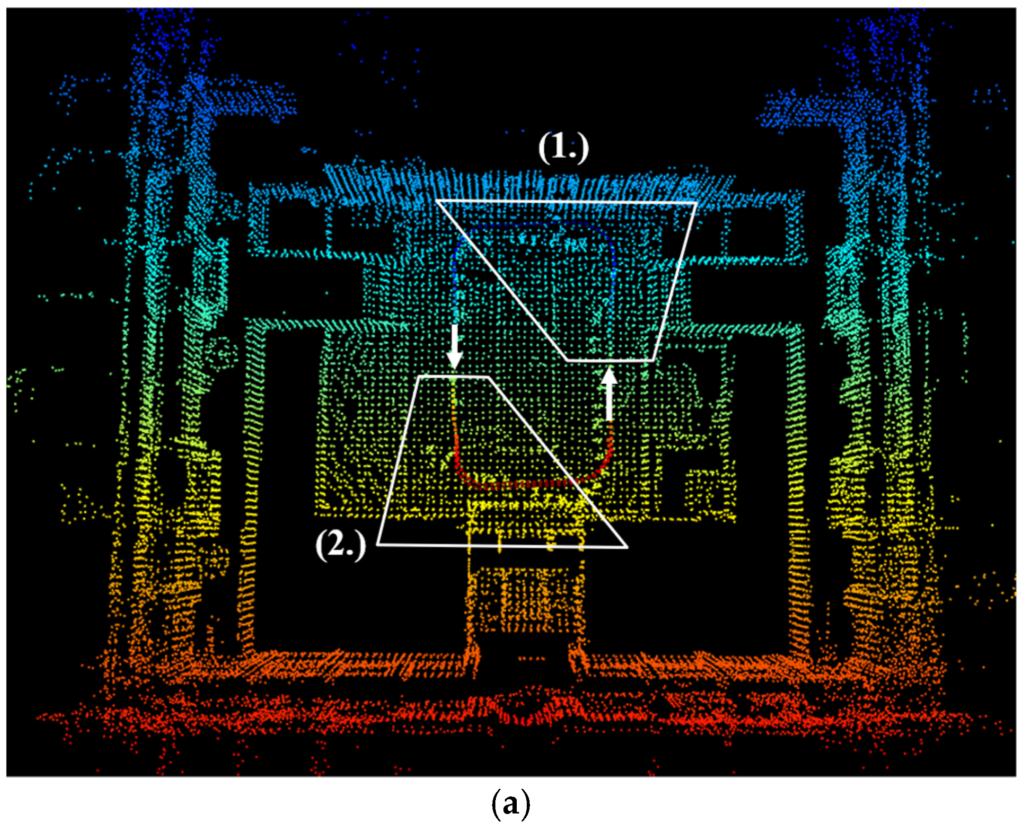
This method employs laser scanners (LIDAR) to measure distances to surrounding objects, creating detailed 3D maps.
- Advantages: High accuracy and resilience to varying lighting conditions.
- Limitations: Expensive hardware and higher computational demands.
Experimental Evaluation
The study tested Visual SLAM and LiDAR SLAM in various environments:
- Indoor Spaces: Both technologies were evaluated in controlled settings with different lighting levels and structural complexities.
- Outdoor Spaces: Algorithms were assessed in natural environments with variable lighting, weather conditions, and dynamic obstacles.
Performance Metrics
Key metrics for comparison included:
- Localization Accuracy: How precisely each method determines the robot’s position in the environment.
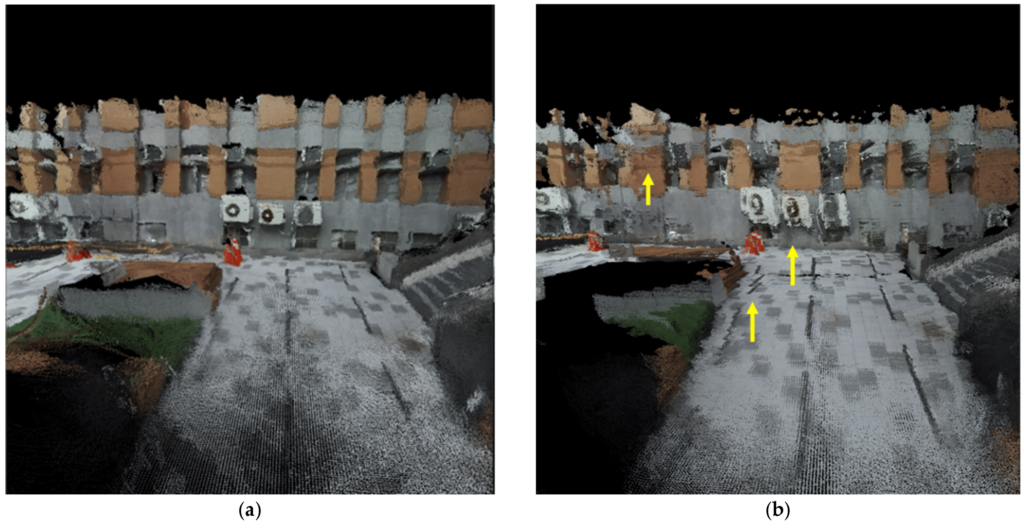
- Mapping Quality: The level of detail and correctness in the generated maps.
- Computational Efficiency: The resources and time required for data processing and map updates.
- Robustness: Each method’s ability to maintain performance in dynamic conditions, such as moving objects or lighting changes.
Key Findings
- LiDAR SLAM:
- Superior performance in low-light environments and with complex geometries.
- High-precision mapping and robustness in dynamic settings.
- Higher computational costs and expensive equipment.
- Visual SLAM:
- Effective in well-lit environments with textured surfaces.
- Cost-efficient and requires less computational power.
- Performance degrades in low-light conditions or environments lacking unique visual features.
Practical Implications
The study emphasizes that the choice between Visual SLAM and LiDAR SLAM depends on specific application requirements:
- LiDAR SLAM is ideal for industrial applications and challenging environments where precision is critical.
- Visual SLAM is suitable for cost-sensitive projects and environments with consistent lighting and textured features.
Conclusion
Both SLAM methods have unique strengths and limitations. Understanding these differences helps engineers and researchers select the most suitable approach for their specific needs in mobile robotics. The study also highlights the importance of combining theoretical analysis with experimental evaluations to ensure reliable performance assessments.