Bridges are some of the most important—and challenging—pieces of infrastructure to maintain. Every day, they are exposed to traffic loads, wind, temperature changes, and constant environmental stress. Over time, even small structural changes can become serious problems.
That’s why engineers are turning to digital twins more and more.
A digital twin isn’t just a 3D model – it is a detailed, measurable digital copy of a structure
"A digital twin helps monitor deformation, detect issues early, and create a solid baseline for future inspections."
Federric Alva, engineer and technical director of ATIS
By comparing new survey data with previous datasets, engineers can detect deformation, monitor wear, and identify issues before they become critical.
A good example of this approach is the digital twin created for the La Constitución de 1812 bridge in Cádiz, Spain. This is one of the highest bridges in Europe, with a clearance of 69 meters and a total length of approximately 5 kilometers.
Its size, height, and complex cable-supported design make it a perfect case for why LiDAR-based inspections are becoming vital for large infrastructure projects.
Traditional bridge inspections often rely on visual surveys, rope access teams, or manned platforms. These methods can be quite slow, expensive, and difficult to repeat with the same level of accuracy.
A drone equipped with LiDAR changes that process completely. Using the combination of the DJI Matrice 400 and the DJI Zenmuse L3, it is possible to capture:
The resulting digital twin becomes a long-term reference model that can support maintenance planning, deformation monitoring, and structural analysis.
Accurate positioning is the foundation for high quality LiDAR data. During a typical survey process, a local RTK base station was set up with the DJI D-RTK 3 Multifunction Station.
Instead of relying on a public CORS network, the local base station keeps the baseline short and avoids connectivity issues—both of which improve the final accuracy.
The D-RTK 3 base station was mounted on a tripod near the bridge and configured in base mode. Once confirmed by the green status light, the aircraft was linked through the remote controller and calibrated to the RTK position.
Before moving on, the RTK status on the aircraft must show “Fixed.” Without a stable RTK solution, even the best LiDAR sensor will not deliver reliable results.
While the base station continued recording, a second DJI D-RTK 3 Multifunction Station was used in rover mode to collect ground control points.
Ground control points (GCPs) are a critical component of any high-precision reconstruction. They are used during processing to both georeference and validate the final model.
In a typical inspection project of this scale:
Collecting checkpoints, separately from control points, is a way to quantify the final accuracy.

Once the ground control was complete, the flight route was imported into DJI Pilot 2.
For long linear structures such as bridges, route planning has a major impact on the quality of the final model. A simple straight-line flight is rarely enough.
Typical settings for a bridge inspection mission include:
Parameter | Setting |
LiDAR Sampling Rate | 100 kHz |
Scanning Mode | Non-repetitive |
Overlap | Approx. 70% |
Course Angle | Approx. 170° |
Flight Pattern | U-shaped |
Although the Zenmuse L3 supports much higher sampling rates, 100 kHz was selected for this type of project because it increases flight range and allows the entire bridge to be covered more efficiently without compromising the required level of detail.
Non-repetitive scanning was selected because it captures the structure from multiple angles. This is especially important on cable-stayed bridges, where cables, pylons, and undersides can easily create shadowed areas in the point cloud.
A U-shaped route pattern worked particularly well because it followed the bridge geometry and maintained consistent overlap across the entire structure.

Once the pre-flight checks confirm correct RTK status and sensor operation, the mission can begin. The aircraft automatically follows the planned route while recording LiDAR and RGB data simultaneously.
During the flight, the operator can watch several views in real time:
Although the LiDAR sensor remains pointed toward the structure below, the FPV system allows the pilot to maintain full situational awareness around the aircraft.
This is particularly important when flying around:
If necessary, the mission can be paused immediately and manual control can be taken.
Certain areas of a bridge, particularly those beneath the deck or near support structures, might require additional manual flights and alternative routes. While automated mapping missions are incredibly effective, complex infrastructure often necessitates extra passes to guarantee thorough coverage.

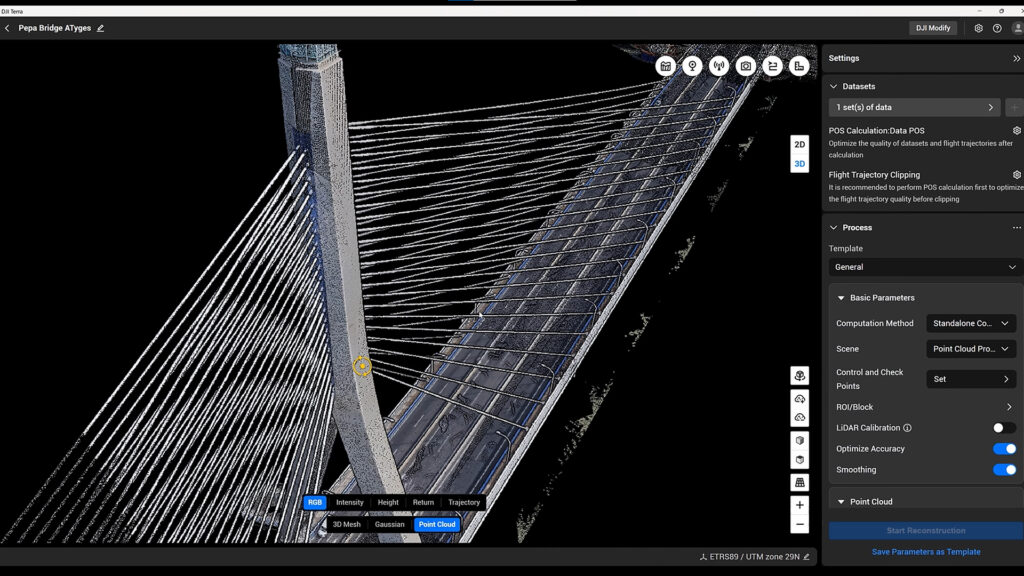
After the flight is completed, all captured datasets are typically imported into DJI Terra. A new LiDAR reconstruction project was created, and the coordinate system was adjusted to match the local survey reference used on site.
The ground control points and checkpoints collected with the D-RTK 3 system were then imported into the project.
The following processing options were enabled:
Several reconstruction outputs were generated:
Depending on the size of the project, the complete digital twin may be ready after several hours of processing. The final point cloud captured extremely fine details across the entire bridge structure, including:
The 3D mesh and Gaussian splatting outputs provided a more visually realistic representation of the bridge, making the model easier to review and share with engineers, inspectors, and project stakeholders.
The final accuracy report generally confirms whether the workflow has achieved survey-grade results.
Accuracy Metric | Result |
Total Processing Time | Approx. 5 hours |
RMS Error | Approx. 2 cm |
Ground Control Point Error | Less than 7 mm |
These results demonstrate that the combination of DJI Matrice 400, Zenmuse L3, and DJI Terra is capable of producing highly accurate digital twins suitable for engineering, inspection, and long-term monitoring.
The final deliverables can be exported to additional platforms such as DJI Modify or third-party CAD and engineering software.
The real value of a digital twin appears long after the survey is complete.
Once the model exists, engineers can return to it at any time and compare it with future inspections. Repeated surveys make it possible to:
For critical infrastructure such as major bridges, this creates a much more proactive approach to maintenance.
Instead of reacting to visible problems, engineers gain the ability to monitor the structure continuously and make decisions based on precise, measurable data.
That is ultimately what a digital twin is for: transforming a real structure into a reliable source of long-term information.